OUR TECHNOLOGY
CYBERNETIC ORGANISM
身体と機械をつなぐ、21世紀のサイボーグ技術
CORE TECHNOLOGY
 生体信号処理
生体信号処理
新たな身体と高度に同期する
生体信号処理技術
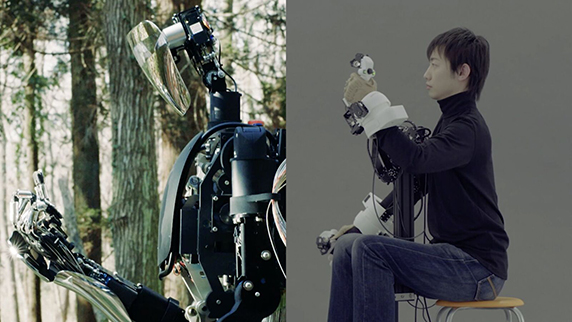
生体信号とは、神経を通して人間の四肢を動かし、五感を脳に伝えている電気信号のこと。サイボーグとなるためには、この生体信号を取得して新たな身体と同期する必要があるが、従来の技術では人の多彩な動きに対応できなかった。しかし、独自の生体信号処理技術により、多彩な生体信号を高精度かつリアルタイムで解析する。これによって、特別な訓練なしで直感的にサイボーグの身体で活動することができる。
 ロボット機構制御
ロボット機構制御
生体模倣にヒント、
世界で最も人間に近い技術
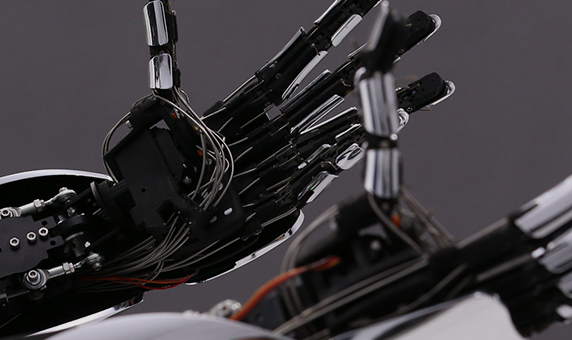
MELTINのロボットハンドの動作機構は、人間の身体、特に筋肉と腱の構造を徹底的にリサーチし、人の手を“生物模倣”することから着想を得ている。MELTINは人間の手の複雑な動作をワイヤー駆動によって再現。卵を割らないようにつかみ、ラップトップをつまんで持ち上げる、中身の入った500ミリリットルのペットボトルをシェイクするほどのパワーといった、従来のロボットでは考えられない力強く繊細な動きが、人の手と同等のサイズ・重量で可能になった。この技術は世界でもまだ前例がなく、ヒトの手が持つ繊細さ、器用さ、強度といった特徴を、ひとつの手で構成できる、まったく新しいテクノロジーである。
境界線を超えるサイボーグ、
MELTANT-α(メルタント・アルファ)
MELTINが開発したサイボーグコンセプトモデル「MELTANT-α」。
人に最も近い「手」の動作が可能なこのモデルは、柔軟性、スピード、パワー、耐久性、緻密さ、
などの複雑な動きができるため、世界のどこへでも進出可能な「もうひとつの身体」となる。
MELTANT-α
TECHNOLOGY TIPS
リアルタイム性
人の手の動きを模倣し、ロボットの常識を打破
操作者の入力に反応するまでの時間は約0.02秒。この動作速度であれば、人がもっとも素早く手指を動かした際の動きを十分に追従することが可能だ。MELTANT-αは、人の手の動作速度を実用レベルで再現可能な、唯一のロボットハンドを持つ。
パワー
小型で軽量、しかし強力。
人の手の機構を模倣したワイヤー駆動による制御機構により、MELTANT-αは、片手でも500ミリリットルペットボトル飲料を振り回したり、4キログラム以上の物体を支えたりできるなどの強力な動作が可能。さらにこの技術はアクチュエータに依存しないため、油圧など他のアクチュエータと組み合わせることが可能です。
繊細な動き
人のように強く、しなやかな手
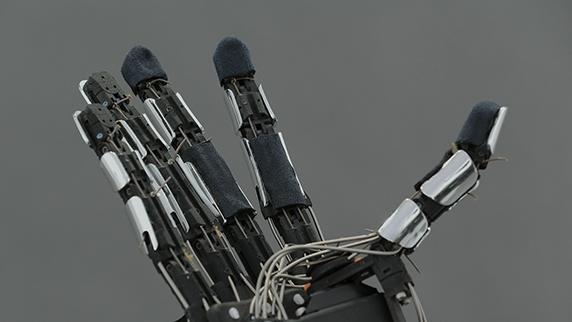
従来の技術ではワイヤー駆動は制御が難しく、人の手のような繊細な動きを再現することは困難だった。しかしMELTANT-αは独自の制御アルゴリズムによって、卵を割らずに持ち、花びらをそっとつまむようなしなやかな動作を行うことができる。
耐久性
過酷な環境にも適応する、ロバストな設計
MELTANT-αは独自の駆動メカニズムによって、アクチュエータ負荷を分散。万が一の故障の際も、他の正常なアクチュエータで動作を補うことがきるロバスト性を持つ。また、伸縮性を持つ高分子系ワイヤを採用したことで、耐衝撃性能も高い。
遠隔操作性
18,900キロ先の世界で生きる、
もうひとつの“身体”。
情報を送信するアルゴリズムを最適化することで、ボストンから日本のデータサーバを経由し、アブダビにあるロボットハンドを、遅延ストレスを感じさせることなく動作させることに成功。
ハプティクス
新しい世界を感じよう
モノをさわった時に感じる反力感覚である「力覚」は、手を使って作業を行う際に、その力加減を決定する上で重要な情報をもたらしてくれる。MELTANT-αはこの「力覚」を操作者にフィードバックする機能を実装。現在は圧力のフィードバックが実現可能であり、質感も視野に入れている。